【導(dǎo)讀】在傳感器避障領(lǐng)域,采用單一的傳感器測(cè)量的效果并不理想,在實(shí)際應(yīng)用中往往需要采用其他類型的傳感器進(jìn)行補(bǔ)償,才能實(shí)現(xiàn)對(duì)周圍環(huán)境的探測(cè)的最佳效果。當(dāng)然,這就產(chǎn)生了多傳感器信息的融合處理的問題,增大了信息處理的工作量和難度。
那么,除了這種傳感器避障方法,還有很多的其他方法融合處理多種傳感器信息,讓全自主機(jī)器人實(shí)現(xiàn)完美避障,比如人工勢(shì)場(chǎng)法避障控制法、模糊邏輯控制避障控制法、人工神經(jīng)網(wǎng)絡(luò)避障控制法、柵格法避障控制法以及聲波避障控制法等。
人工勢(shì)場(chǎng)避障控制法
人工勢(shì)場(chǎng)避障控制法,是一種比較簡(jiǎn)單又新穎的做法,是另一種仿生學(xué),仿照物理學(xué)中電勢(shì)和電場(chǎng)力的概念,建立機(jī)器人工作空間中的虛擬勢(shì)場(chǎng),按照虛擬勢(shì)場(chǎng)力方向,實(shí)現(xiàn)局部路徑規(guī)劃。
通過構(gòu)造目標(biāo)位姿引力場(chǎng)和障礙物周圍斥力場(chǎng)共同作用的人工勢(shì)場(chǎng),來搜索勢(shì)函數(shù)的下降方向,然后尋找無碰撞路徑。
聽起來很玄乎,但是早已經(jīng)有應(yīng)用產(chǎn)品了,Khatib曾應(yīng)用于移動(dòng)機(jī)器人的導(dǎo)航上。但是并沒有得到大規(guī)模應(yīng)用。
因?yàn)榧词箤?duì)于簡(jiǎn)單環(huán)境很有效,但是都是在靜態(tài)的研究中得出的,而沒有考慮障礙物的速度和加速度的影響,所以在動(dòng)態(tài)避障控制中,人工勢(shì)場(chǎng)法避障控制不是很理想。因?yàn)樵趶?fù)雜的多障礙環(huán)境中,不合理的勢(shì)場(chǎng)數(shù)學(xué)方程容易產(chǎn)生局部極值點(diǎn),導(dǎo)致機(jī)器人未到達(dá)目標(biāo)就停止運(yùn)動(dòng),或者產(chǎn)生振蕩、擺動(dòng)等現(xiàn)象。
另外,傳統(tǒng)的人工勢(shì)場(chǎng)法著眼于得到一條能夠避障的可行路徑,還沒有研究出什么最優(yōu)路徑。
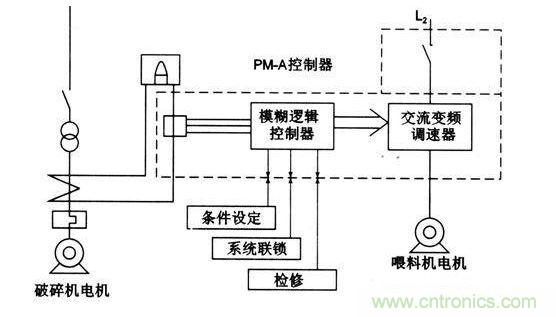
模糊邏輯控制避障法出現(xiàn)得并不晚,1965年美國(guó)的一位教授就提出過模糊邏輯的概念。1974年,英國(guó)倫敦大學(xué)一位教授利用模糊控制語(yǔ)句組成的模糊控制器控制鍋爐和氣輪機(jī)的運(yùn)行獲得成功,開始將模糊數(shù)學(xué)應(yīng)用于自動(dòng)控制領(lǐng)域,包括機(jī)器人領(lǐng)域。
由于不必創(chuàng)建可分析的環(huán)境模型,目前模糊邏輯方法在解決機(jī)器人避開障礙物問題上己經(jīng)有了大量的研究工作。另一個(gè)獨(dú)特優(yōu)點(diǎn)也讓用專家知識(shí)調(diào)整規(guī)則成為可能,因?yàn)橐?guī)則庫(kù)的每條規(guī)則具有明確的物理意義。
在模糊邏輯控制避障法中,模糊控制規(guī)則是模糊控制的核心。當(dāng)前研究工作的新趨勢(shì)之一是它的漸增本質(zhì),特別是在模糊控制規(guī)則的自動(dòng)生成方面,即連同自動(dòng)模糊數(shù)據(jù)獲取,給予算法在線模糊規(guī)則學(xué)習(xí)能力,數(shù)據(jù)獲取和規(guī)則生成均自動(dòng)執(zhí)行。
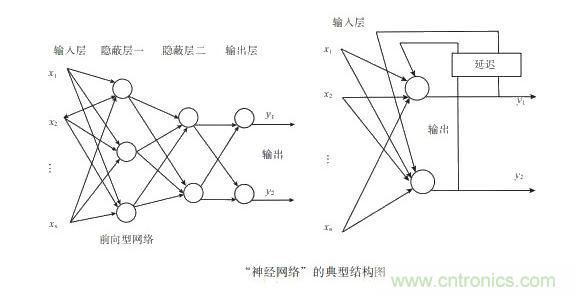
人工神經(jīng)網(wǎng)絡(luò)是由許多單元(又稱神經(jīng)元),按照一定的拓?fù)浣Y(jié)構(gòu)相互連接而成的一種具有并行計(jì)算能力的網(wǎng)絡(luò)系統(tǒng),它具有較強(qiáng)的非線性擬合能力和多輸入多輸出同時(shí)處理的能力。用在機(jī)器人上,就是通過模擬人腦神經(jīng)網(wǎng)絡(luò)處理信息的方式,從另一個(gè)研究角度來獲取具有人腦那樣的信息處理能力。
對(duì)于智能機(jī)器人來說,采用人工神經(jīng)網(wǎng)絡(luò)進(jìn)行信息融合有一個(gè)最大優(yōu)勢(shì),即可大規(guī)模地并行處理和分布式信息存儲(chǔ),具有良好的自適應(yīng)、自組織性,以及很強(qiáng)的學(xué)習(xí)功能、聯(lián)想功能和容錯(cuò)功能,接近人腦的信息處理模式。
這屬于用啟發(fā)式算法在單元中搜索安全路徑。賦予每個(gè)柵格一個(gè)通行因子后,路徑規(guī)劃問題就變成在柵格網(wǎng)上尋求兩個(gè)柵格節(jié)點(diǎn)間的最優(yōu)路徑問題。搜索過程多采用四叉樹或八叉樹表示工作空間。
柵格法以基本元素為最小柵格粒度,將地圖進(jìn)行柵格劃分,比如基本元素位于自由區(qū)取值為0,處在障礙物區(qū)或包含障礙物區(qū)為1,直到每個(gè)區(qū)域中所包含的基本單元全為0或全為1,這樣在計(jì)算機(jī)中就較容易建立一幅可用于路徑規(guī)劃的地圖。
柵格粒度越小,障礙物的表示會(huì)越精確,也就更好避障。但往往會(huì)占用大量的儲(chǔ)存空間,而且算法也將按指數(shù)增加。
聲波避障控制法
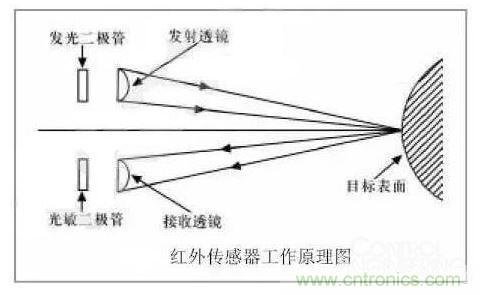
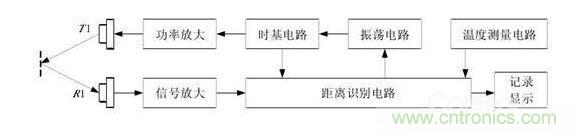
聲波避障行為能夠?qū)崟r(shí)監(jiān)測(cè)長(zhǎng)距離超聲波傳感器,為機(jī)器人搜索開闊路徑。當(dāng)機(jī)器人離障礙物還有一定距離時(shí),超聲波傳感器就能夠檢測(cè)到相關(guān)信息,并據(jù)此控制機(jī)器人離開。
然而,超聲波傳感器對(duì)非常接近的物體會(huì)探測(cè)不到,這個(gè)距離稱為物理探測(cè)盲區(qū)。在剛發(fā)射信號(hào)的時(shí)候,返回信號(hào)的閾值會(huì)被設(shè)定得很高以防止發(fā)射波直接觸發(fā)接收器,因此如果檢測(cè)的距離很短、閾值沒有下降,返回信號(hào)已經(jīng)到達(dá)接收器,這時(shí)接收器會(huì)認(rèn)為這個(gè)返回信號(hào)是剛發(fā)出的信號(hào)從而拒絕接收,使超聲波傳感器形成一個(gè)探測(cè)盲區(qū),沒法對(duì)近距離物體探測(cè)。
另一個(gè)缺陷是,如果在一個(gè)比較小的轉(zhuǎn)彎角度上安裝有平滑的表面,該表面能夠?qū)⒙暭{波束向前反射,而不是反射回機(jī)器人。在這種情況下,由于沒有回波返回,傳感器就會(huì)產(chǎn)生一次漏報(bào),機(jī)器人也會(huì)因此認(rèn)為在自己行走的路徑上沒有障礙物存在。此時(shí),聲波避障行為不能得以觸發(fā),也就無法避障。
近年來,激光雷達(dá)在移動(dòng)機(jī)器人導(dǎo)航中的應(yīng)用日益增多。這主要是由于基于激光的距離測(cè)量技術(shù)具有很多優(yōu)點(diǎn),特別是其具有較高的精度。
激光雷達(dá)與其它距離傳感器相比,能夠同時(shí)考慮精度要求和速度要求,這一點(diǎn)特別適用于移動(dòng)機(jī)器人領(lǐng)域。此外,激光雷達(dá)不僅可以在有環(huán)境光的情況下工作,也可以在黑暗中工作,而且在黑暗中測(cè)量效果更好。不過,該傳感器也有一些相應(yīng)的缺點(diǎn),比如安裝精度要求高、價(jià)格比較昂貴等。